
|
/ Summer 2018 |
AUTONOMOUS SUPPORT AND POSITIVE INSPIRATION ROBOT VERSION 2.0
|
ASPIR is the spiritual successor to Halley, the Ambassador Robot 001 (2015), a popular low-cost, open-source, 2.6-foot laser-cut humanoid robot. Over the course of showcasing the Halley Robot, we've found that humanoid robots are awesome at looking human and eliciting social-emotional responses from human viewers. There are plenty of humanoid robots out there for sale, but they all really fall into just two categories: affordable toy hobbyist robots that are less than 2-feet tall, and full-size, and research-grade humanoid robots that cost more than new sports cars. We wanted to bring the best of both worlds together with an affordable, open-source full-size humanoid robot. And thus the ASPIR project was born.
With 6 super-size mega servos per each leg, 4 high-torque standard servos for each arm, 5 metal-gear micro servos for each hand, and 2 additional standard servos for the head's pan/tilt mechanism, the ASPIR robot's actuators move with a staggering total of 33 degrees of freedom. For your reference, we have included sample reference links to various servomotors you will need to build the ASPIR robot here. As mentioned in the introduction previously, the ASPIR is a supermassive 3D printing endeavor. With over 90 parts to print, total estimated print time using standard 3D filament extrusion, infill and layer height settings is expected to be somewhere in the ballpark of 300 hours. This will likely consume 5 rolls of 1 kg (2.2lb) filament, not including printing failures and retries (We used Robo3D PLA rolls for all our 3D printing needs). Also note that you will need a large 3D printer with a minimum build plate size of 10x10x10in (250x250x250mm), such as the Lulzbot TAZ 6 for some of the larger 3D printed pieces of the ASPIR robot. Get all the 3D printed parts you need here in this Github repository. My current software to get the robot doing these things is currently in the works, and it's certainly going to be a while before it becomes fully ready to go. Due to it's prototypical nature, note that the current design of ASPIR is highly limited in its capabilities; it's certainly not perfect as it is now and it probably never will be. But this is ultimately a good thing - this leaves plenty of room to improve, make modifications, and develop advancements in the field of robotics with research you may truly call your own. The ASPIR Project is made possible with the generous support of the Frank-Ratchye STUDIO for Creative Inquiry of Carnegie Mellon University. Further documentation: Official website: www.choitek.com Forums: http://forum.choitek.com/ Source: https://github.com/Choitek/ASPIR-3D-Print-Files-V1 Full DIY Guide: https://www.instructables.com/id/ASPIR-Full-Size-3D-Printed-Humanoid-Robot/ |

"If you can dream it, you can do it." - Walt Disney
|

ASPIR V2 looking face forward.
|
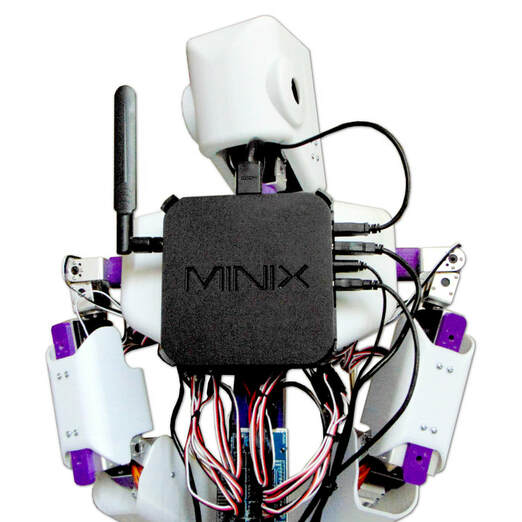
A back view with ASPIR V2's Mini PC box.
|
