Crab Controller & Crab Simulator (Spring 2015)
Interactive Art and Computational Design, Carnegie Mellon University
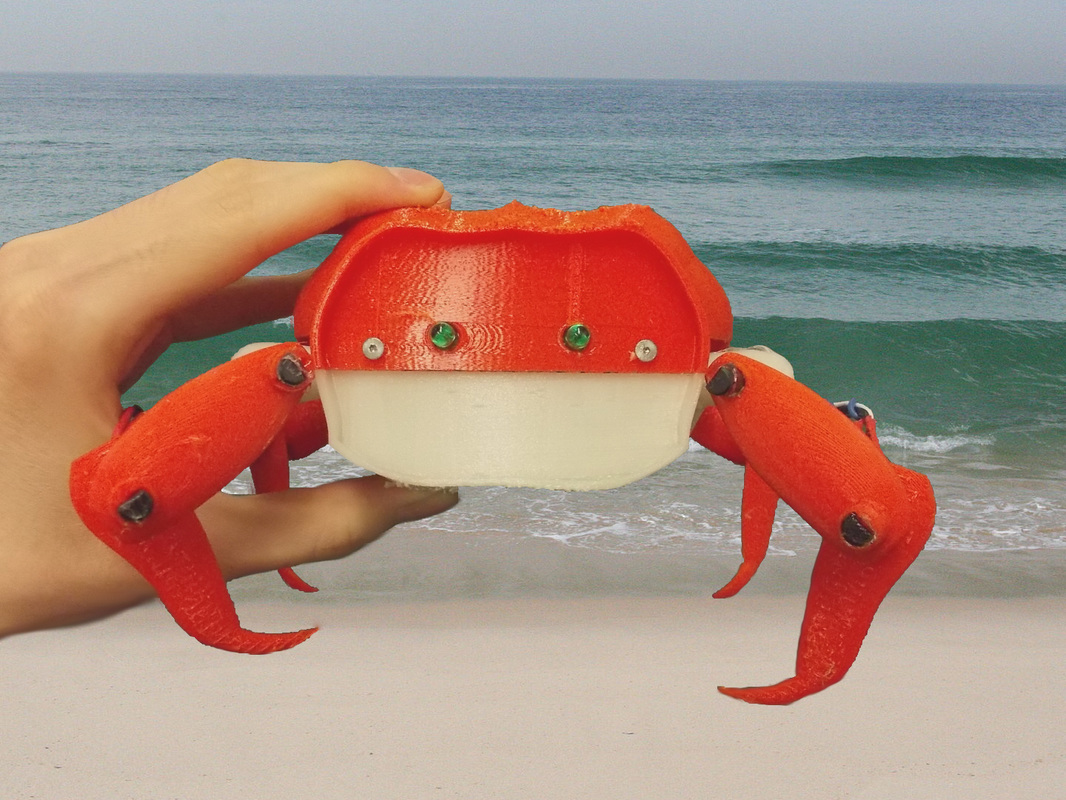
A 3D-printed, posable crab input joystick for controlling tetrapod walkers, motion capture, and simulations. With 4 legs and 3 degrees of freedom per leg, the Crab Controller sends data through an Arduino Mega via the Standard Firmata protocol to another device. Here, the crab controller is being used to control an underwater virtual crab simulator in real time.
Instructables Documentation: http://www.instructables.com/id/Crab-Controller-Crab-Simulator/
GitHub: https://github.com/johnchoi313/Crab-Controller-Simulator
Interactive Art and Computational Design, Carnegie Mellon University
A 3D-printed, posable crab input joystick for controlling tetrapod walkers, motion capture, and simulations. With 4 legs and 3 degrees of freedom per leg, the Crab Controller sends data through an Arduino Mega via the Standard Firmata protocol to another device. Here, the crab controller is being used to control an underwater virtual crab simulator in real time.
Instructables Documentation: http://www.instructables.com/id/Crab-Controller-Crab-Simulator/
GitHub: https://github.com/johnchoi313/Crab-Controller-Simulator
